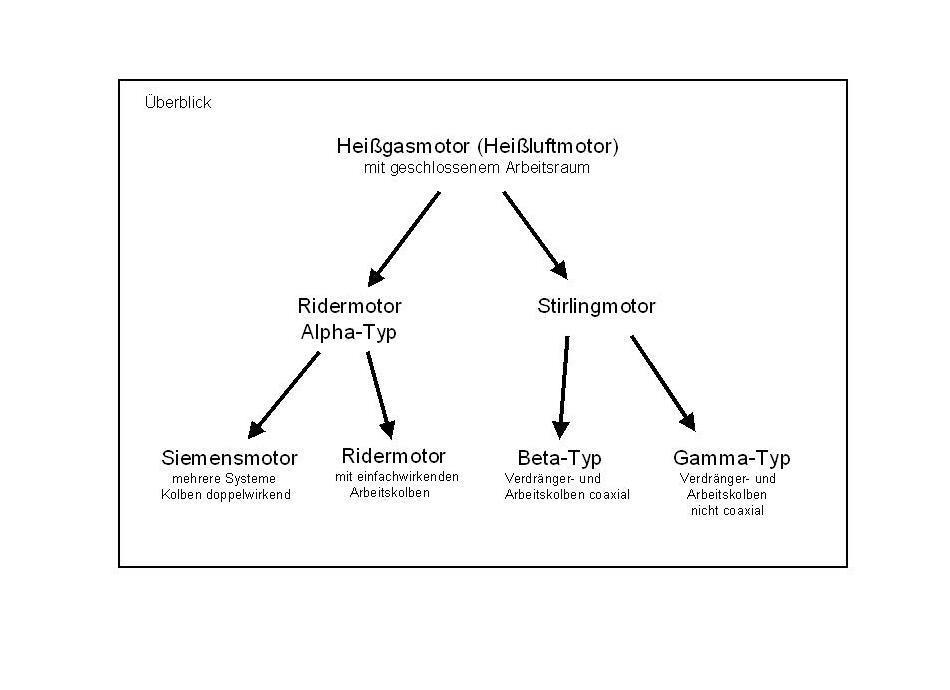
Definition
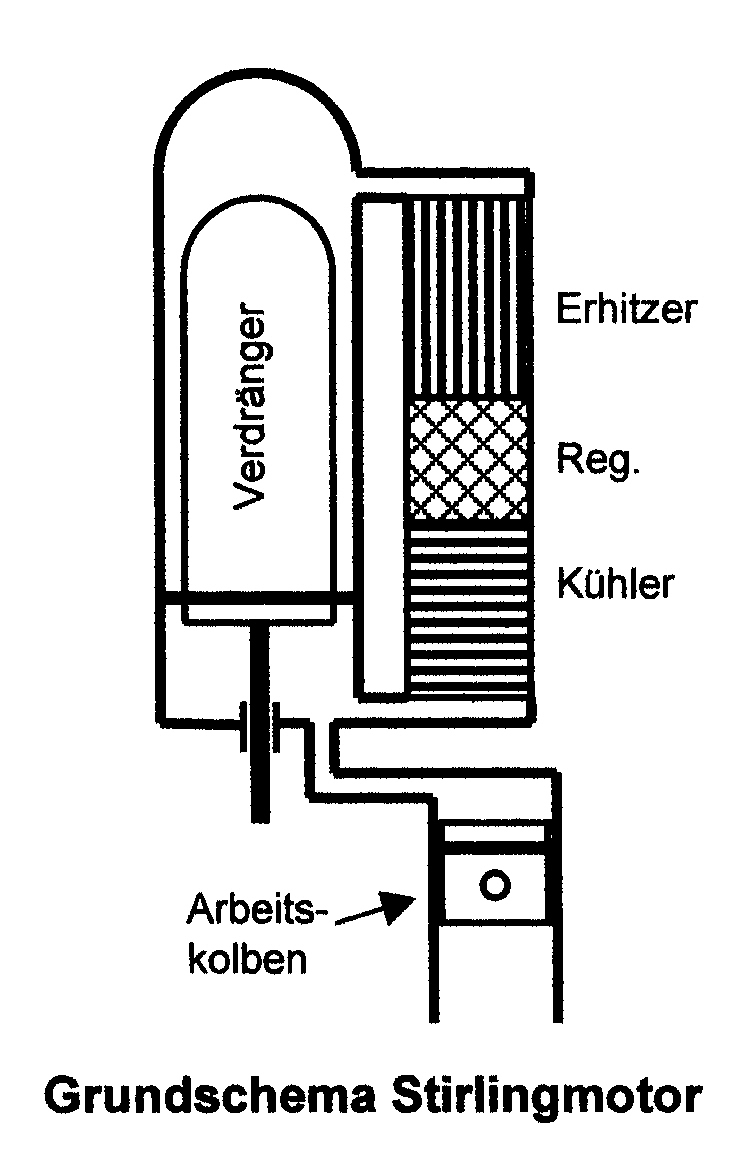
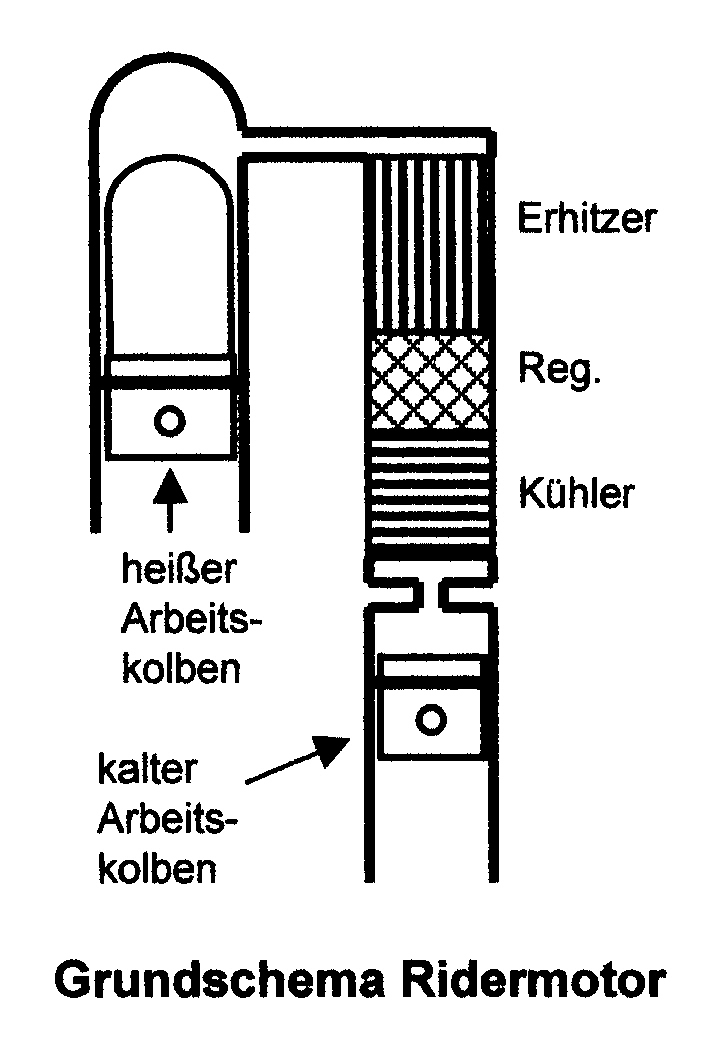
Stirlingmotor / Ridermotor
Aktuelle
Beispiele Stirlingmotor:
 |
 |
 |
 |
alle
Niedertemperatur-Motoren
wie z.B. der Sunwell
|
St5 von
Sunpower
|
alle
Freikolbenmaschinen
|
Viebach
ST05-G |
 |
 |
 |
|
Ecker-Motor
1-75
|
Mayer&Cie-Motor
LG1-100
|
und alle
Modellmotoren
|
Aktuelle Beispiele Ridermotor:
 |
 |
 |
 |
 |
|
SOLO-161
|
Ridermotor mit
Magnetaus-
kopplung von Bomin-Solar,
hier beim Kältetest
|
der SI-1, ein kleiner
Doppel-Rider mit ringförmigen
Erhitzern und Regeneratoren
|
30kW-Biomasse-Alpha-Typ
Johanneum Research, Graz
Foto: Johanneum Research
|
STA 520-32
Sunmachine
Foto: E.Weber
|
Alexander Kirk Rider ist nicht der Erfinder,
aber er ist der Einzige, der mit 80.000 verkauften Maschinen eine
erfolgreiche Massenproduktion mit dem Alpha-Typ umsetzen konnte. Ihm
gebührt die Ehre, dass der Motor seinen Namen trägt.
Wer
den Alpha-Typ erfunden hat, ist nicht sicher. Möglicherweise
war
es C.L.F. Franchot oder einer seiner Studenten in Paris.
Vor-
und Nachteile der Motoren
Der Vorteil des
Ridermotors ist die Vermeidung von
Totvolumina, wie sie bei Gamma-Stirlingmotoren unvermeidlich sind.
Damit erhält
der Ridermotor theoretisch eine Leistungsdichte, die des
Beta-Stirlingmotors entspricht, bei gleichzeitiger Einfachheit des
Kurbeltriebwerkes wie
bei einem
Gamma-Stirlingmotor.
Allerdings gibt
es auch zwei Nachteile, die die
Leistungsdichte wieder fast auf die Leistungsdichte eines
Gamma-Stirlingmotors
herabsetzt. Beim Stirlingmotor hatte man die Reibung von einem
Kolbenring und
die sehr kleine Reibung eines Kolbenstangen-Dichtrings, aber
beim Rider
hat man die Reibung von zwei vollen Kolbenringen. Der zweite Nachteil
ist die
thermische Wärmeleitung, die nun zweimal an Druckgefäßwandungen
auftaucht, am
Heißteilzylinder und am Regenerator-Gehäuse.
Diese
Nachteile werden allerdings wieder aufgehoben, wenn die Kolben des
Ridermotors doppelwirkend genutzt werden. Rund 20 Jahre bevor Alexander
Rider seine erste Motorenproduktion
aufnahm,
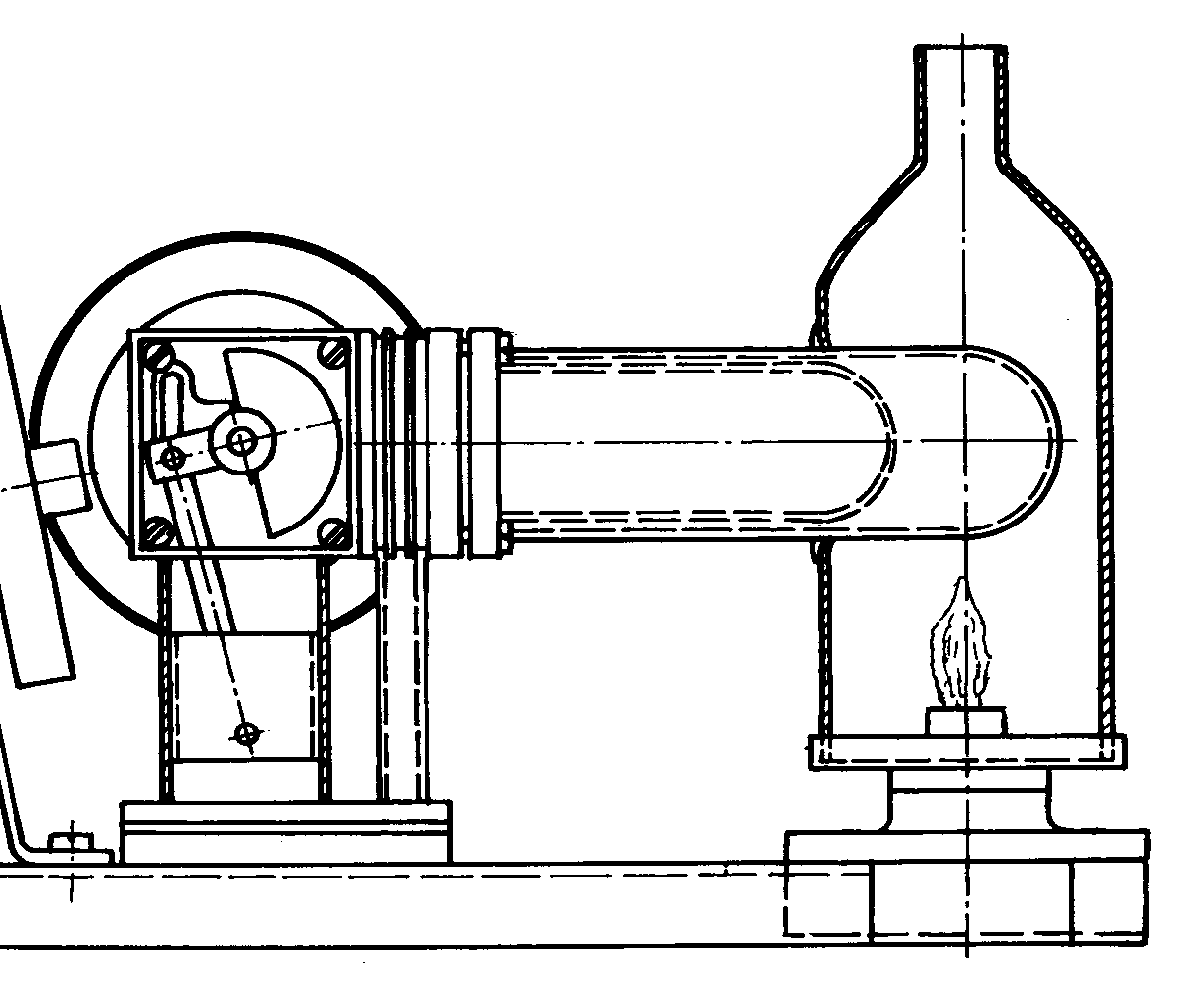
waren solche doppelwirkenden Heißluftmaschinen bereits bekannt. C.L.F.
Franchot, ein französischer Gelehrter aus Paris patentierte 1853 einen
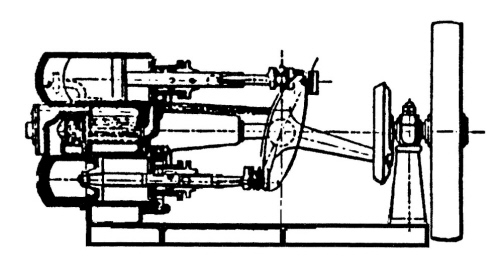
Vierzylinder-Motor, der später auch als Siemensmotor bekannt wurde. Sir
William Siemens, ein
Bruder des
deutschen Firmengründer Werner von Siemens zeichnete um 1870
einen
solchen Motor mit Taumelscheiben-Getriebe. Der
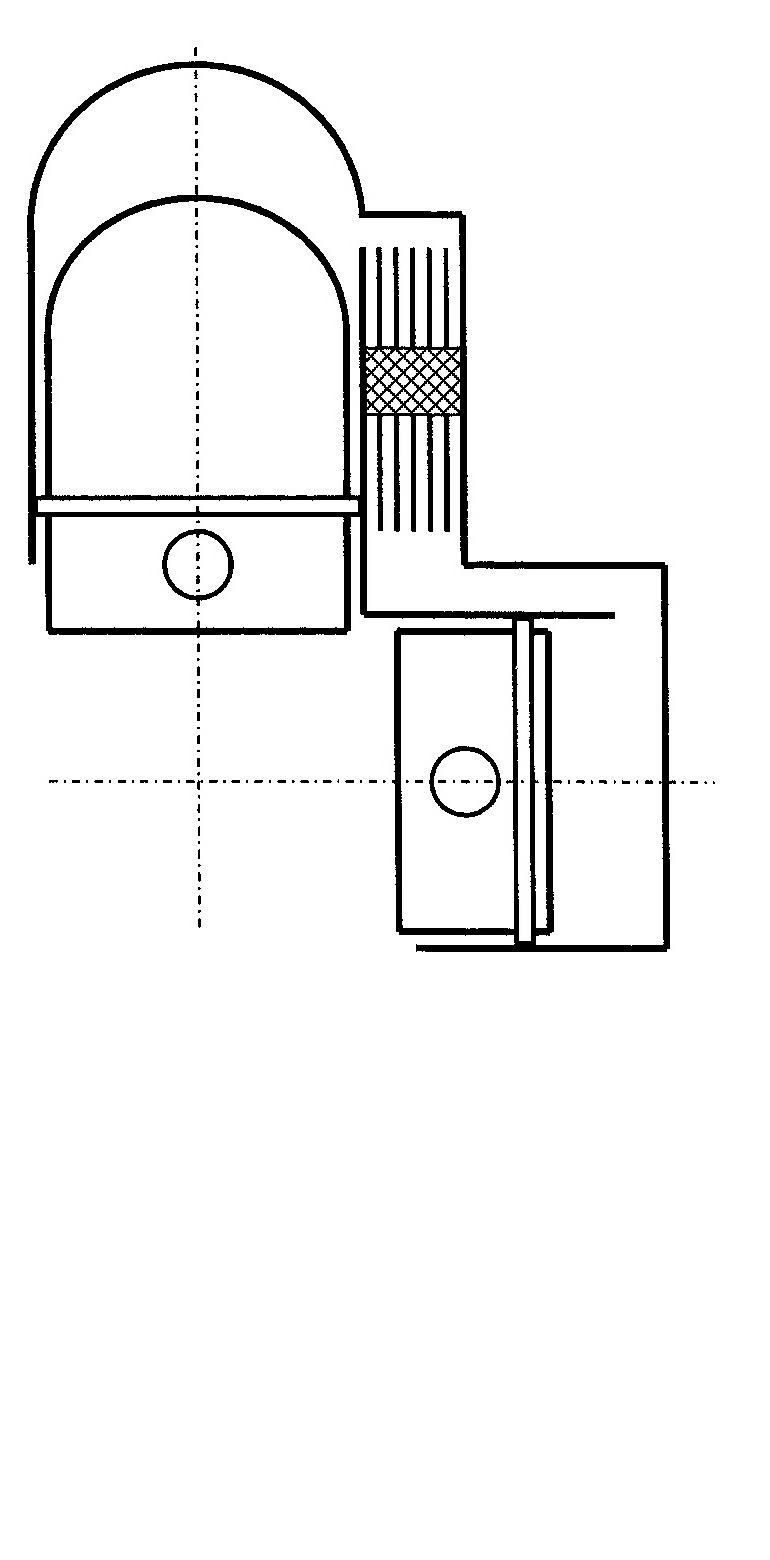
gedankliche Werdegang von einem Rider- zu einem Siemensmotor
ist
folgender:

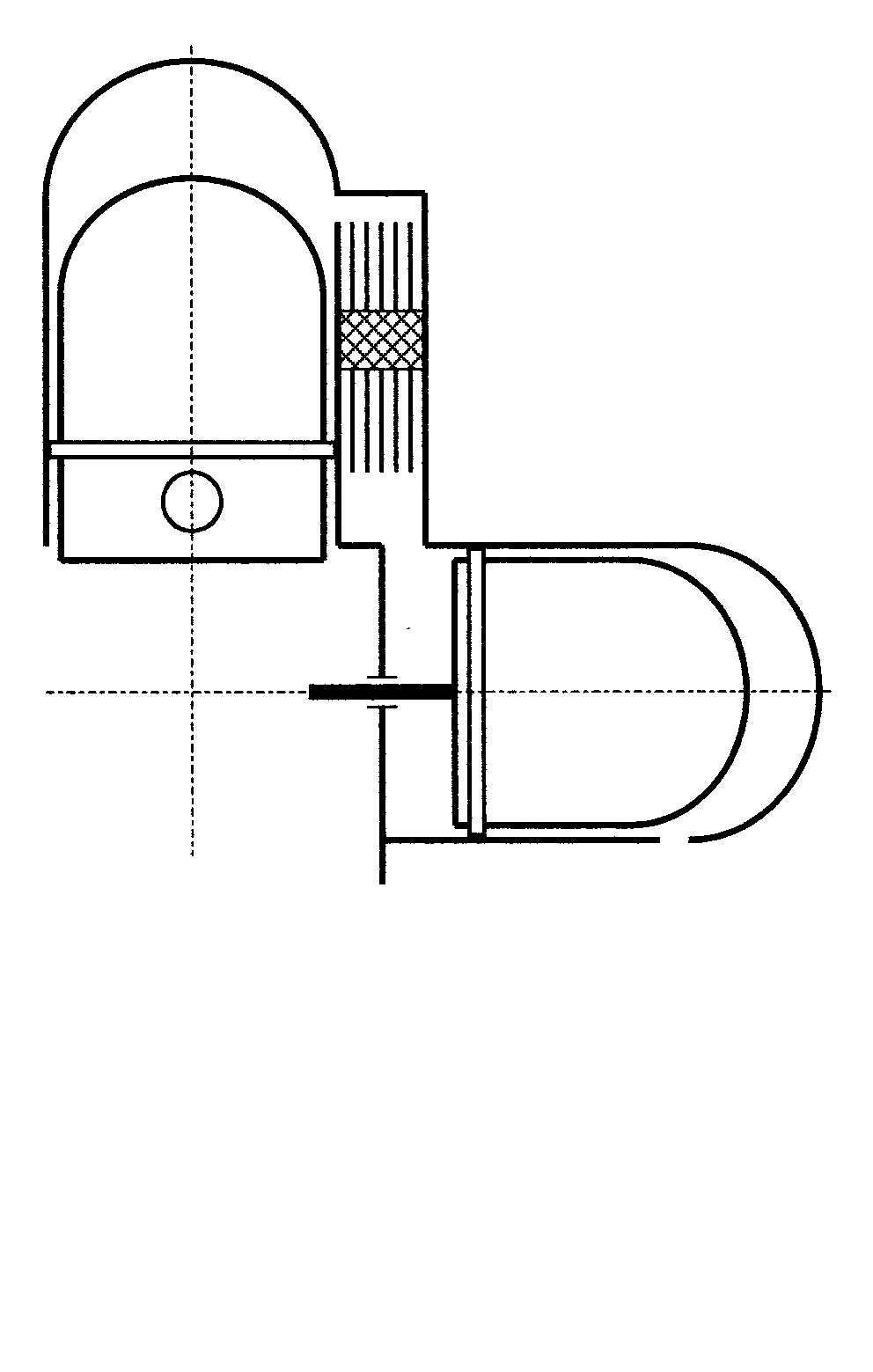
Man ersetze den
kalten Tauchkolben durch eine Kolbenscheibe mit Kolbenstange und führe
das
Arbeitsgas, das vom Kühler kommt, statt auf den
Kolben, unter diesen Kolben,
versehe
diesen Kolben mit einem Dom
und füge ein weiteres Wärmetauscherpaket dazu und einen weiteren
Kolben, und
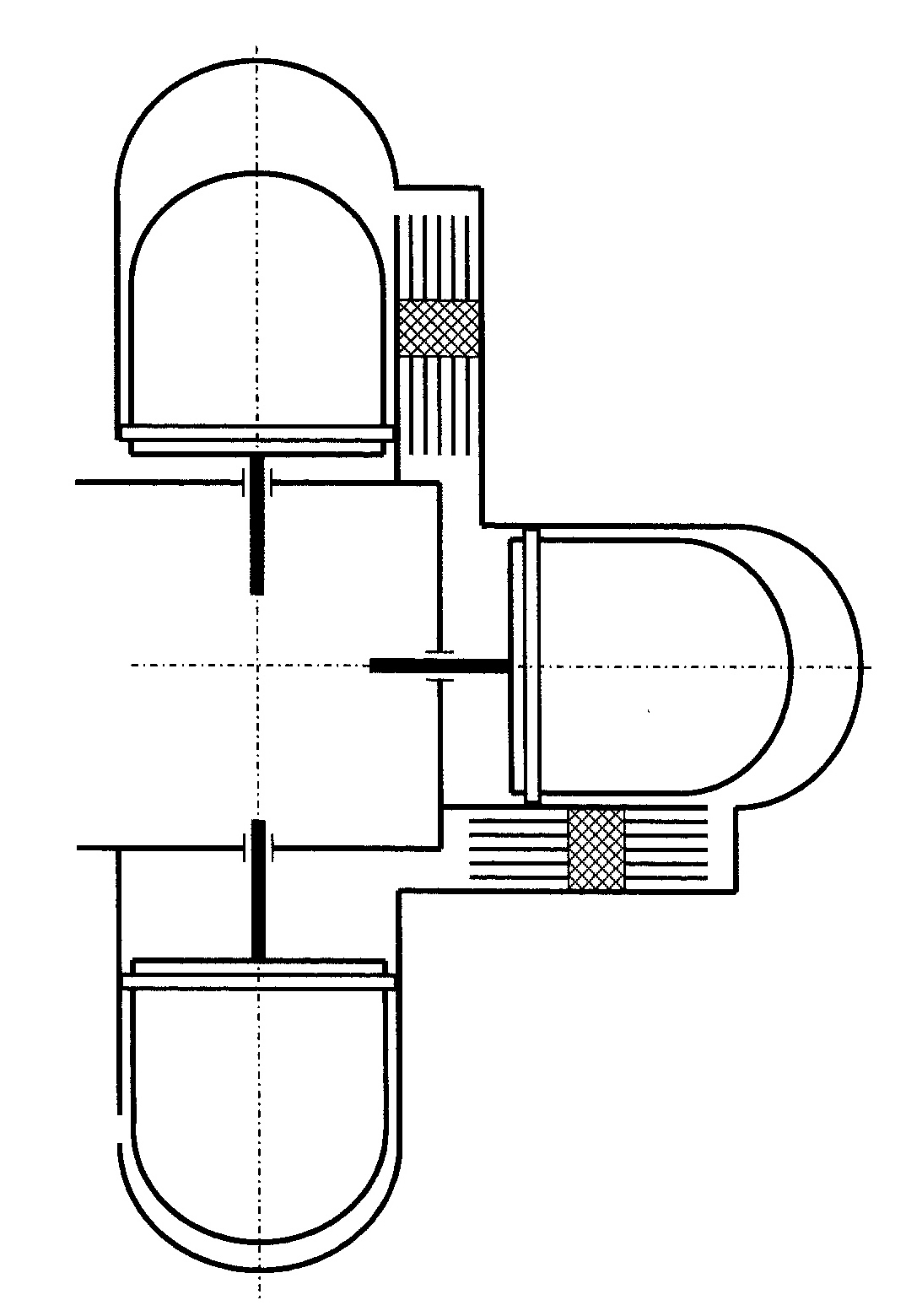
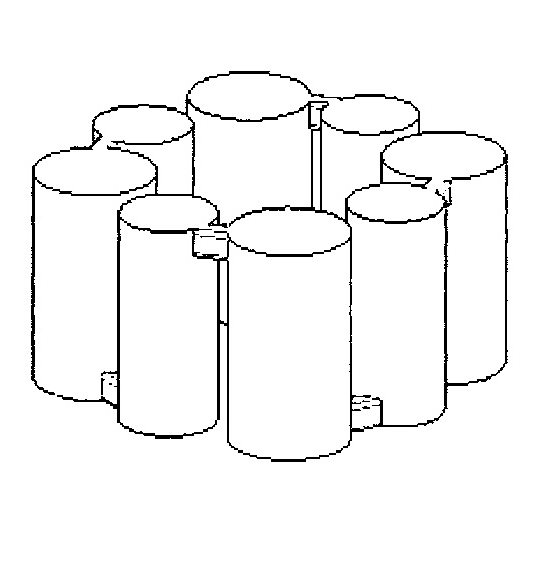
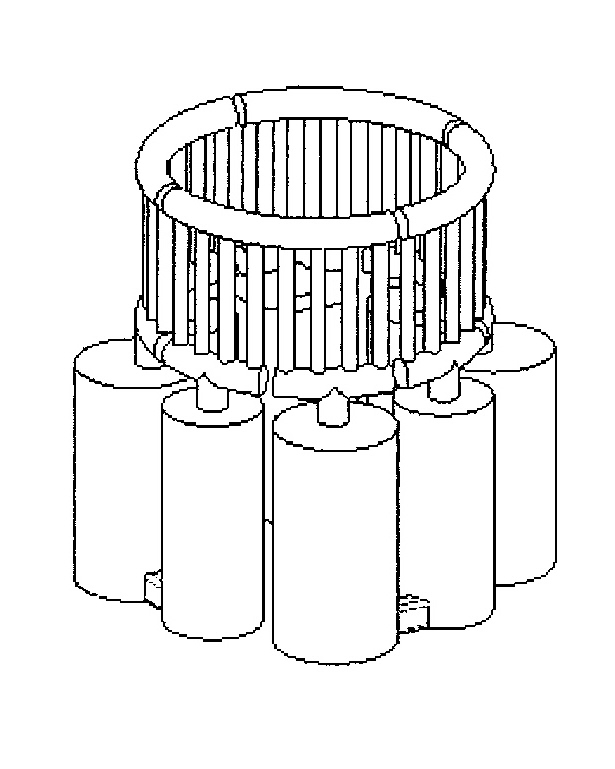
so weiter, bis eine sternförmige Anordnung entsteht. Solche
Sternmotoren würden
tatsächlich funktionieren, aber die Punkte für die Beheizung liegen
sehr weit
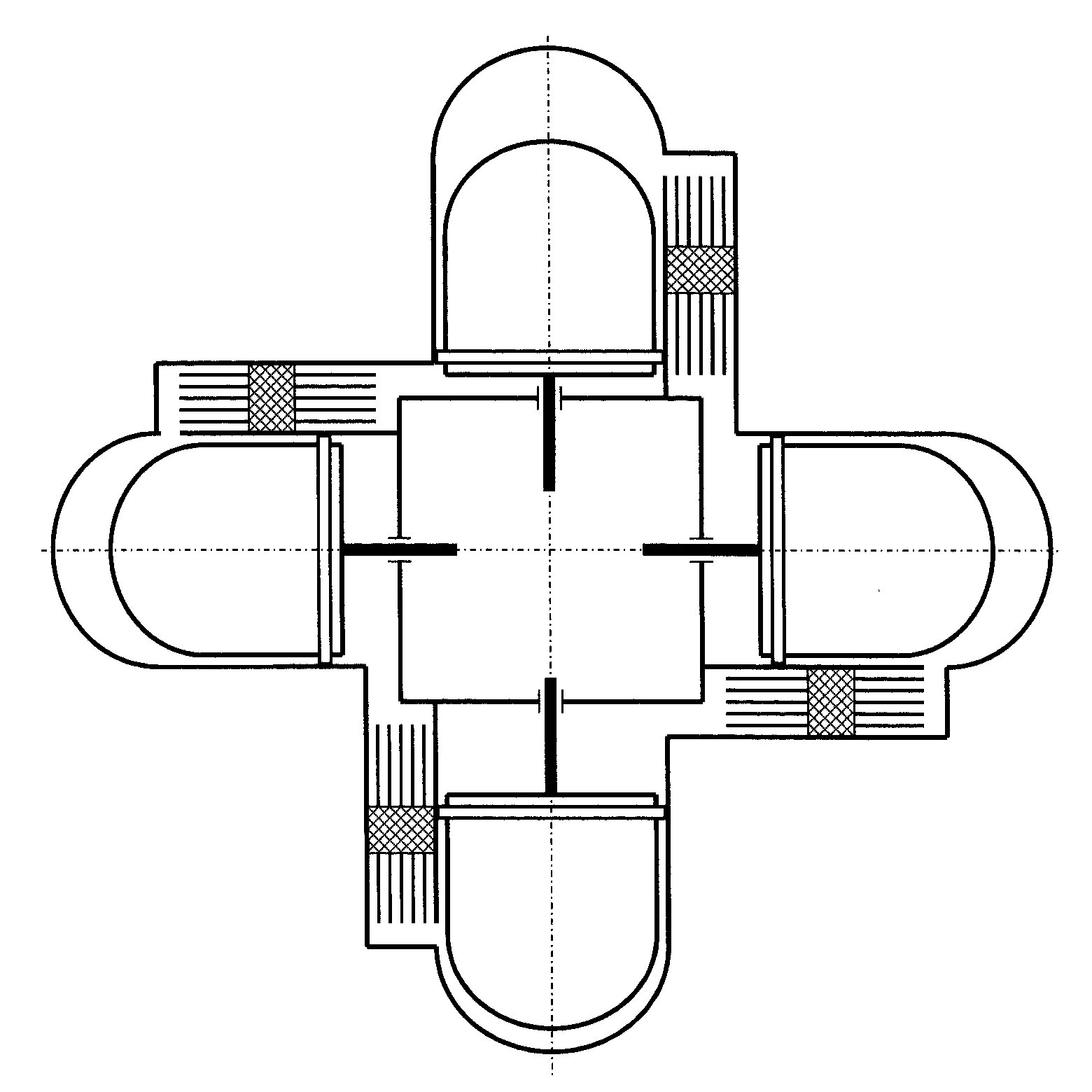
auseinander. Klappt man nun den ganzen Stern zusammen, etwa wie es eine
Blume
mit ihren Blütenblätter am Abend macht, dann kann man alle vier
Heißteil-Wärmetauscher mit einer einzigen Flamme beheizen (rechts
William Siemens mit seinem Motor).
Meist
wurden
vier Zyklusräume mit vier doppelbeaufschlagten
Kolben gebaut, auch wenn man Temperaturen über 600°C zum Betrieb eines
solchen Motors benötigt. Besser ist es, man wählt eine
Anordnung
mit sechs Systemen (MAN), und mit acht Systemen könnte man problemlos
eine einfache Hackschnitzel-Verbrennung als Feuerung einsetzen. Weiter
unten dazu eine Tabelle und ein Diagramm.
Die
Kolben
solcher Ridermotoren sehen Verdrängern von
Stirlingmotoren übrigens auf den ersten Blick verblüffend ähnlich. Aber
die
Kolbenstangen müssen viel größere Kräfte übertragen und besitzen
deshalb einen ca. doppelt so großen Durchmesser. In der Literatur, über
das Internet bis
hin
zu Hochglanz-Broschüren einiger Firmen werden die beiden Motoren immer
wieder verwechselt. Das ist aber nicht zuletzt aus urheberrrechtlichen
Gründen ein unhaltbarer Zustand. Ehre wem Ehre gebürt, schließlich
nennt man einen Dieselmotor auch nicht Ottomotor. Bedauerlich und
tragisch wird die Verwechslung, wenn eine Firma einen Ridermotor baut,
aber den Phasenwinkel wie bei Stirlingmotoren üblich
ansetzt, in der irrigen Annahme, der fälschlich "Stirlingmotor nach dem
Alpha-Typ" bezeichnete Motor wäre ein Stirlingmotor. (Auch zum
Phasenwinkel unten mehr.) Einige Firmen gingen deshalb schon pleite
oder gaben ihr Engagement in Sachen Heißgasmotoren auf. Neben dem
finanziellen Desaster und den gekündigten Mitarbeitern, bleiben oft
verbitterte Kunden zurück, die sich verprellt fühlen. Das alles dient
nicht einem guten Ruf des Stirling- bzw. Ridermotors.
Eine Besonderheit
gibt es noch beim Getriebe. Der alte Siemensmotor
hatte bereits ein Taumelscheibentriebwerk, das sich heute auch im
WisperGen
wiederfindet. Alternativ kann man auch rotierende
Schiefscheibentriebwerke einsetzen, deren Achsneigung sogar während des
Betriebes
verstellbar ist, so dass man verschiedene Kolbenhübe bekommt. Und dann
gibt es
natürlich auch hier das klassische Pleueltriebwerk, als V-Motor,
U-Motor und
als Reihenmotor.
Der große
Nachteil des Ridermotors gegenüber dem
Stirlingmotor, die hohe Reibung aufgrund der zwei vollen Kolbenringe,
gibt es
beim Siemensmotor nicht mehr, weil die Kolbenringe jetzt doppelt
beaufschlagt
werden.
 Aktuelle
Beispiele von Ridermotoren nach dem Siemenstyp sind
der WisperGen aus Neuseeland, der für Segeljachten als Stromaggregat in
Serie
produziert und der V 4-275R von Kockums der für U-Boote in Schweden
eingesetzt
wird.
Aktuelle
Beispiele von Ridermotoren nach dem Siemenstyp sind
der WisperGen aus Neuseeland, der für Segeljachten als Stromaggregat in
Serie
produziert und der V 4-275R von Kockums der für U-Boote in Schweden
eingesetzt
wird.
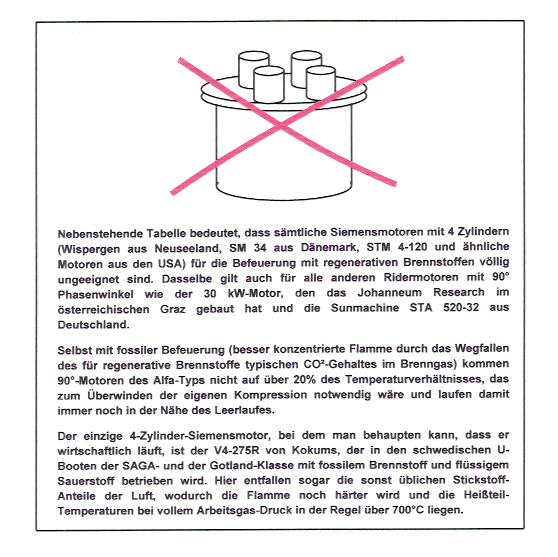
Alle anderen
doppelwirkenden Ridermotoren sind Prototypen
wie zum Beispiel die Vier- und Sechszylindermotoren von Philips ,
General
Motors, United Stirling, MAN und
Ford in
den 60-er und 70-er Jahren sowie in neuerer Zeit die SM34 aus
Dänemark.
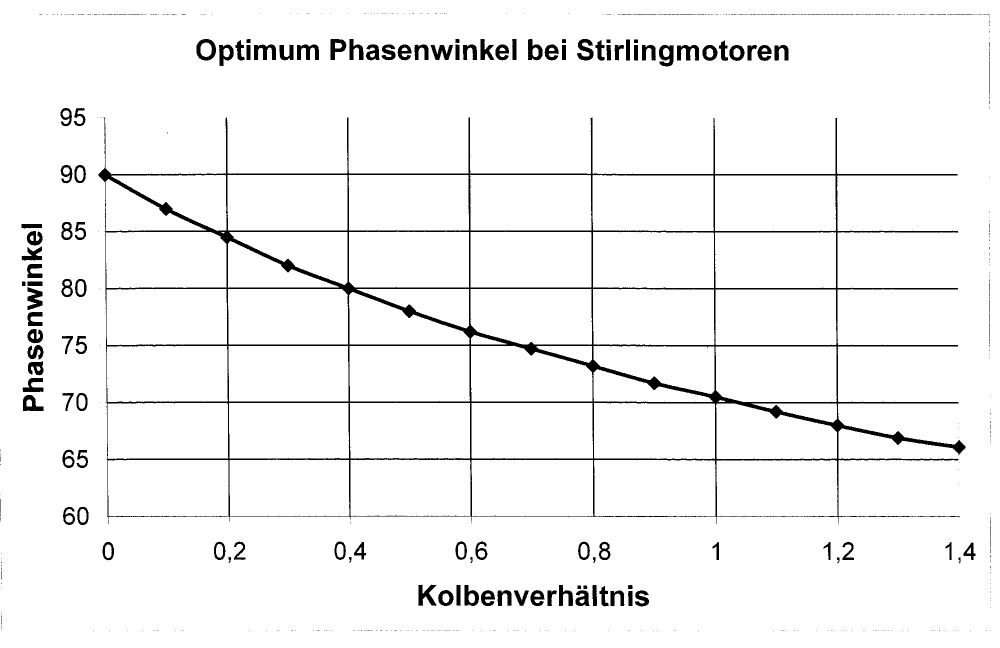
Ein weiterer
grundlegender Unterschied zwischen Stirling-
und Ridermotoren besteht im Phasenwinkel und dem
Kolbenverhältnis:
Beim Gammatyp
wählt man gerne für die beiden Zylinder
unterschiedliche Durchmesser. Je kleiner das Hubvolumen des
Arbeitskolbens zum
Hubvolumen des Verdrängers ausfällt, umso kleiner die zu erwartende
Leistung und der
Wirkungsgrad. Aber solche Maschinen haben den ungemeinen Vorteil, dass
sie
nicht erst bei 350°C anlaufen, sondern schon bei viel niedrigeren
Temperaturen! Dieses Hubvolumenverhältnis zwischen den beiden Kolben -
oder einfach das Kolbenverhältnis, ist eine ganz wichtige Größe in der
Stirling-Technologie. Folgende
Tabelle
zeigt, bei welchen Heißteil-Temperaturen in etwa zu erwarten ist, wann
ein
Motor mit einem ganz bestimmten Kolbenverhältnis anfängt, sich im
Leerlauf zu
drehen. (Auf der kalten Seite wird Raumtemperatur angenommen.)
| Beispiel
|
Kolbenverhältnis
|
Leerlauf-
Temp.
|
PWR
|
An.Zyl
|
| Höchsttemperaturmotor (Spezial-Brennstoffe mit
flüssigen Sauerstoff - Anwendung schwed. U-Boot)
|
2:1
(2,8:1)
|
600°C |
90° |
4
|
Hochtemperaturmotor
(fossile Brennstoffe mit Luft)
|
1,2:1 (1,5:1)
|
350°C
|
120°
|
6
|
Biogas/Biomassemotor
(regenerative Brennstoffe mit Luft)
|
0,72:1 (0,85:1)
|
250°C
|
135°
|
8
|
Glas-Modellmotor
(Spiritus-Brenner)
|
1:1,5 (0,6:1)
|
150°C
|
|
| Niedertemperaturmotor
Sunwell
|
1:10 (0,1:1)
|
60°C
|
| Handwärme-Niedertemperaturmodell
|
1:40
|
30°C
|
Diese
Tabelle
gilt auch für Beta-Stirlingmotoren (und für
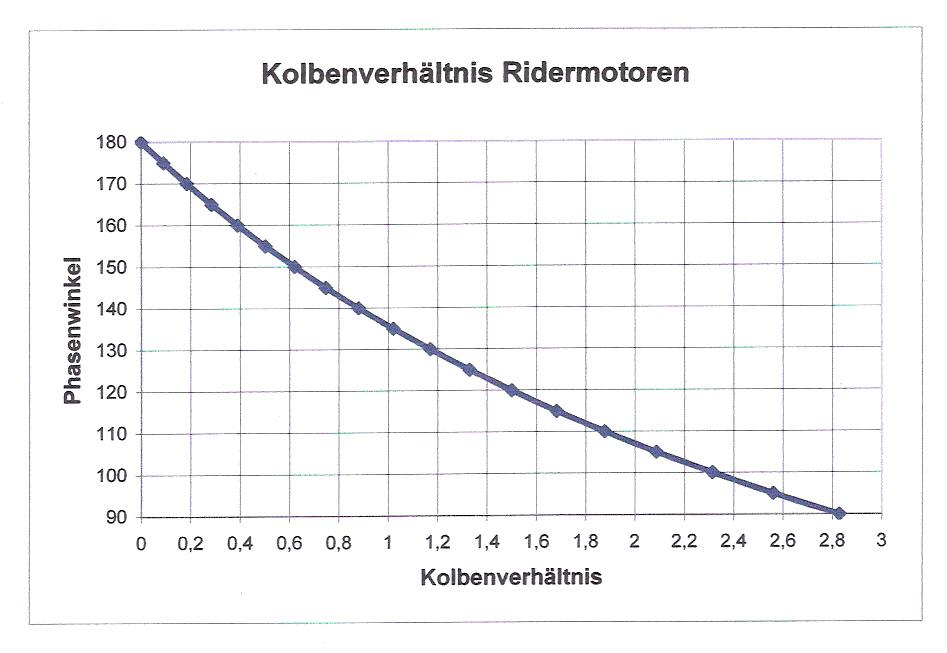
Ridermotoren in Klammern). Der Phasenwinkel bei Ridermotoren (PWR) und
die Anzahl der Zylindersysteme (An.Zyl) bei Siemensmotoren sei hier
auch für drei Kolbenverhältnisse erwähnt, wobei 120° genau genommen
einem Kolbenverhältnis von 1,15 entspricht (siehe Diagramm unten) und
die Anwurf-Temperatur bei 400°C liegen dürfte. Und das sind nur die
Anwurf-Temperaturen. Eine Leistung auf wirtschaftlichem Niveau gibt
z.B. ein Hochtemperaturmotor erst bei 600°C ab.
Beim Betatyp kann
man zwar kein unterschiedliches Hubvolumen
durch zwei verschiedene Durchmesser erreichen, aber man kann die Hübe
verschieden lang realisieren. Gebaut wurden auf diese Weise schon
Kolbenverhältnisse zwischen 0,6 und 1,0.
 Bei Ridermotoren
realisiert man unterschiedliche Kolbenverhältnisse, indem man den
Phasenwinkel (bei einer V-Anordnung) variiert. Fangen wir bei
einer
extremen Niedertemperatur-Variante an: Wenn der Phasenwinkel
fast 180°
beträgt (sagen wir 175°), schieben sich die beiden Kolben das
Arbeitsgas fast
nur noch gegenseitig zu, immer hin und her. Dieses verschobene Volumen
entspricht bei Stirlingmotoren dem Hubvolumen des Verdrängers. Die winzige
Volumenänderung, die durch die
nicht ganz vollständigen 180° (nämlich der 175°) entsteht, entspricht
einem
sehr kleinen Arbeitskolben-Hubvolumen beim Stirlingmotor. Das
Kolbenverhältnis bei 175°
entspricht
0,088, was bedeutet, dass wir es hier mit einem Niedertemperatur-Rider
zu tun haben
Bei Ridermotoren
realisiert man unterschiedliche Kolbenverhältnisse, indem man den
Phasenwinkel (bei einer V-Anordnung) variiert. Fangen wir bei
einer
extremen Niedertemperatur-Variante an: Wenn der Phasenwinkel
fast 180°
beträgt (sagen wir 175°), schieben sich die beiden Kolben das
Arbeitsgas fast
nur noch gegenseitig zu, immer hin und her. Dieses verschobene Volumen
entspricht bei Stirlingmotoren dem Hubvolumen des Verdrängers. Die winzige
Volumenänderung, die durch die
nicht ganz vollständigen 180° (nämlich der 175°) entsteht, entspricht
einem
sehr kleinen Arbeitskolben-Hubvolumen beim Stirlingmotor. Das
Kolbenverhältnis bei 175°
entspricht
0,088, was bedeutet, dass wir es hier mit einem Niedertemperatur-Rider
zu tun haben
Der Phasenwinkel
von 120° entspricht dann einem
Kolbenverhältnis von 1,5 und der Phasenwinkel von 90°
entspricht einem
Kolbenverhältnis von 2,8. Diesen letztgenannten Phasenwinkel
besitzen
fast alle Ridermotoren, weil er leicht zu bauen und auszuwuchten ist.
An der
Tabelle oben sieht man allerdings, dass solche Phasenwinkel
durchaus
nicht das Optimum darstellen und extreme Anforderungen stellen!
Kraft-Wärme-Kopplung mit Pellets-Feuerung ist mit einem solchen Motor
zwar physikalisch machbar, aber nicht wirtschaftlich.
Dies zum
Kolbenverhältnis von Ridermotoren. Genaueres im Artikel "Berechnung
Biomassemotor".
Doch kommen wir
zurück zum Stirlingmotor. Darüber hinaus
gibt es bei ihm nun noch die
Möglichkeit, nicht nur das Kolbenverhältnis zu variieren, sondern auch
den Phasenwinkel.
Dies bewirkt dann eine Reduzierung bzw. Erhöhung
der Kolben-
und
Lagerkräfte (und nicht wie beim Ridermotor eine Änderung des
Kolbenverhältnisses). Wenn man sich vergegenwärtigt, dass eine
Reduzierung der
Lagerkräfte um 10% bereits eine Lebensdauer-Verbesserung um 42%
bedeutet, dann
ist die Optimierung des Phasenwinkels ein Muss für jeden
professionellen Stirlingmotor.
Trotzdem besitzen
fast alle Stirlingmotoren einen Phasenwinkel von 90°. Das liegt wieder
an der einfacheren
Bauweise und
dem einfacheren Auswuchten. Aber
wirklich optimal ist ein Wert von 90° nur bei extremen
Niedrigtemperatur-Stirlingmotoren.
Je größer das Kolbenverhältnis, um so
niedriger sollte der Phasenwinkel gewählt werden. Das
Drehmoment und
damit die Leistung nehmen dabei sogar erst einmal geringfügig zu. Erst
ab einem
bestimmten Winkel nimmt die Leistung dann endgültig ab. Folgendes
Diagramm
zeigt das Optimum.
Last but not
least soll erwähnt werden,
dass Ridermotoren mit fremder Energie, meist mit großen Anlassmotoren
angefahren werden müssen, während Stirlingmotoren so gebaut werden
können, dass
sie selbstanlaufen können !!
 Abschließend
kann man sagen, dass sich Stirlingmotoren möglicherweise nur bis zum
Vierzylinder-Motor durchsetzen werden (zwei Verdränger und
zwei Arbeitskolben).
Abschließend
kann man sagen, dass sich Stirlingmotoren möglicherweise nur bis zum
Vierzylinder-Motor durchsetzen werden (zwei Verdränger und
zwei Arbeitskolben).
Soll
eine Leistung von über 100 kW
erreicht werden, ist der Ridermotor als 6-, 8-, 12- und
16-Zylindermotor dem Stirlingmotor wahrscheinlich überlegen, trotz
aller Möglichkeiten der Kräftereduzierung. Typische Anwendung von
solchen Ridermotoren wären Schiffsantriebe und
Kraft-Wärme-Kopplungen. Das
gilt
allerdings
nicht für Lokomotiven und anderen Fahrzeugen auf Rädern – aber das ist
ein anderes Thema: das Thema
Rekuperation.
 Druckversion
Druckversion
zurück zum
Inhaltsverzeichnis (home)